J'ai faim!
Mechatronic game
This mechatronic game deals with eating. The player has to feed Barbie with sushi, hence the title “J'ai faim!”, which is French for “I'm hungry!”.
Just like Barbie, we here in Europe live a luxurious life where there is no lack of food - quite the contrary. Yet extra calories seem like a sin and many aspire for an unnaturally slender figure in the hope of looking more attractive. Considering how many people actually have to struggle for their daily nourishment, this seems bizarre. “J'ai faim!” is all about making Barbie to eat more and be happy about food. If she doesn't keep eating, or if she eats the wrong stuff, she'll starve and the game is over.

In June 2018 Kati and I had the pleasure to take part again in Eniarof, a fantastic workshop format developed by Antonin Fourneau, where the aim is to create a DIY funfair within just a few days. Last time we were in Tunis, where I developed “Bubble Blast”. This time, the event happened in Malakoff, next to Paris. Together with 20+ people we created and presented games and installations at la Tréso, La Ressourcerie and l'Atelier de curiosité urbaine.

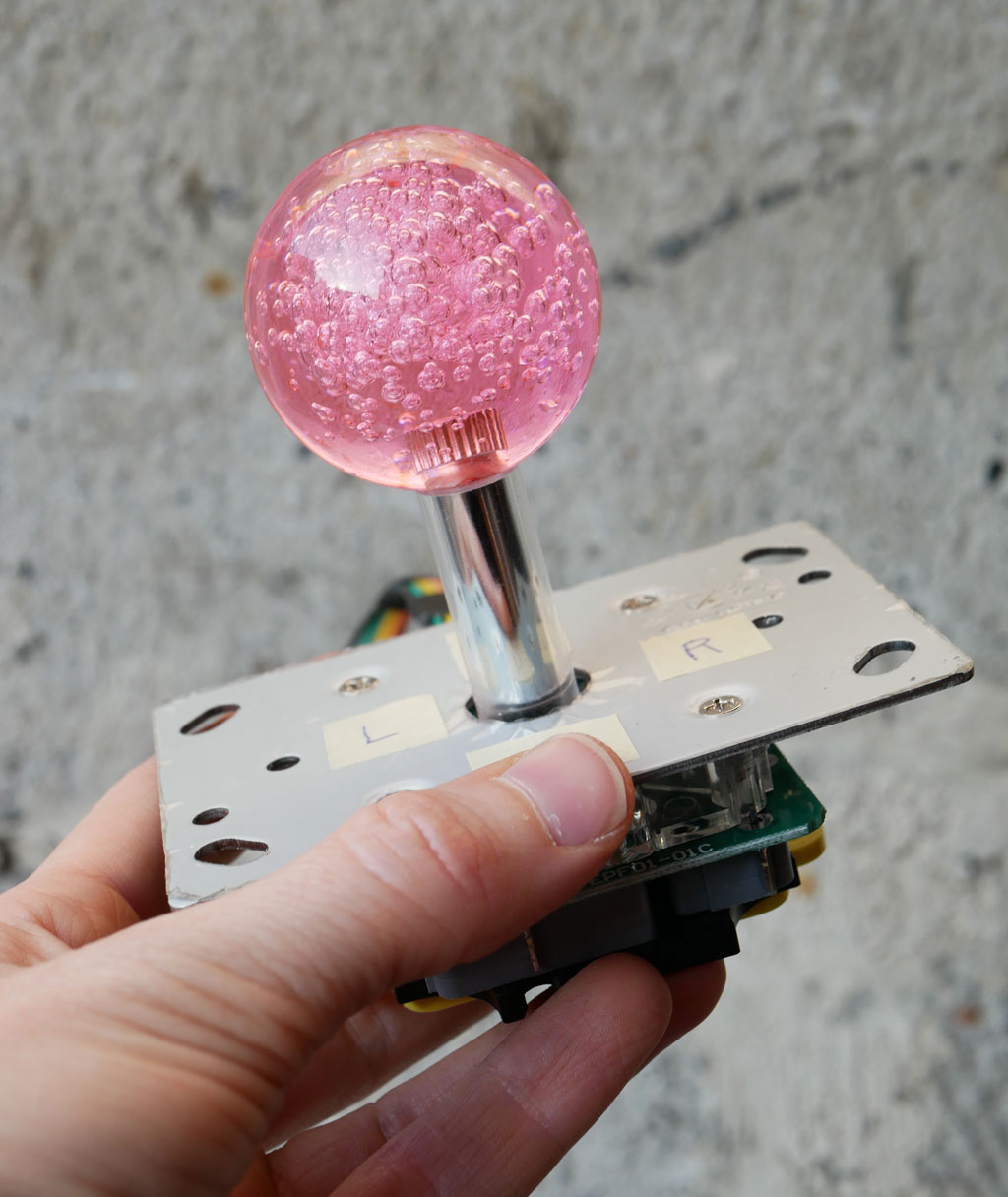
Kati and I worked at La Ressourcerie, which is a wonderful mixture of a recycling center and a thrift store. It has been opened only recently, but had already loads of interesting old objects, furniture and textile items which we could use for making the attractions. The creation that Kati and I made, “J'ai faim!”, was inspired by a pink joystick, local sushi restaurants and a giant Barbie styling head found in the abandoned toys section.
The gameplay
In our game the player has to turn Barbie's head with the joystick towards a randomly highlighted sushi. Then the player has to eat that sushi. The action of eating is indicated by sticking out Barbie's overlong tongue. Eating of highlighted sushis raise the score until one wins the game, while eating unlit sushis lowers the score. The player loses the game if not enough correct sushis are eaten fast. There is also time pressure, as eating nothing at all also makes Barbie starve over time.
How it's made
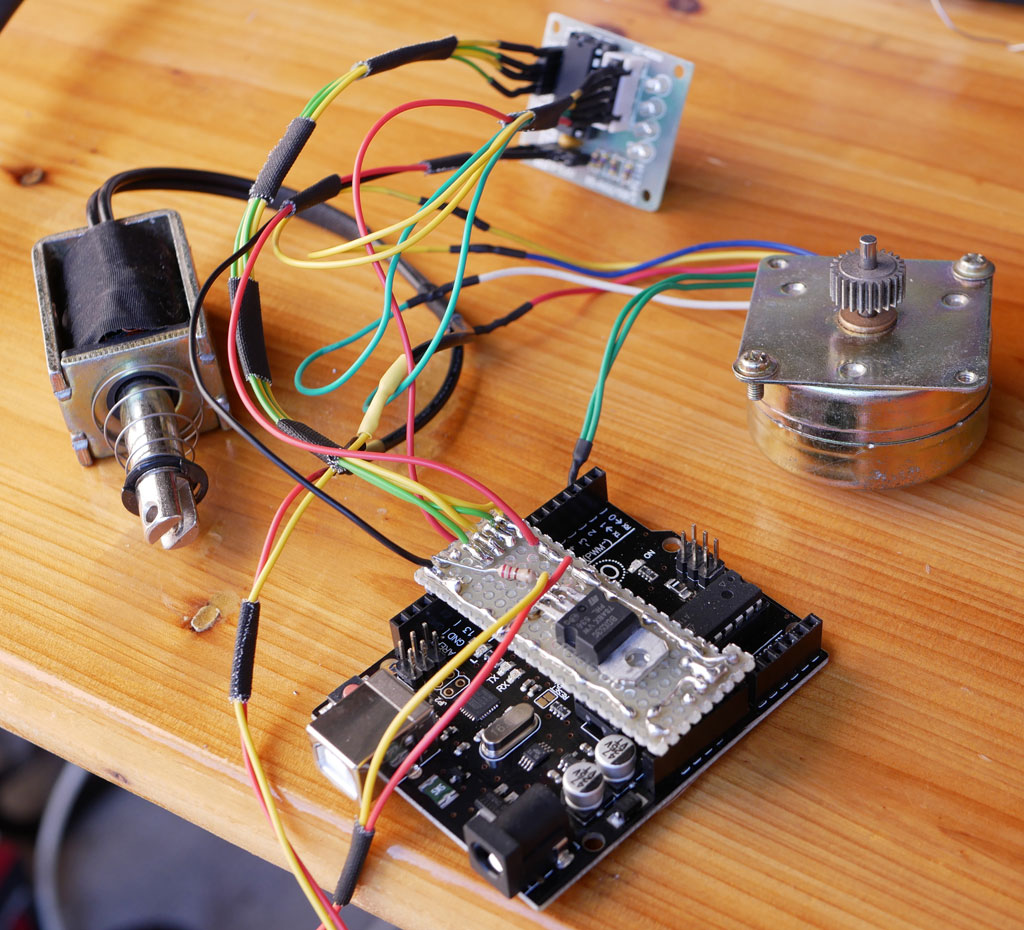
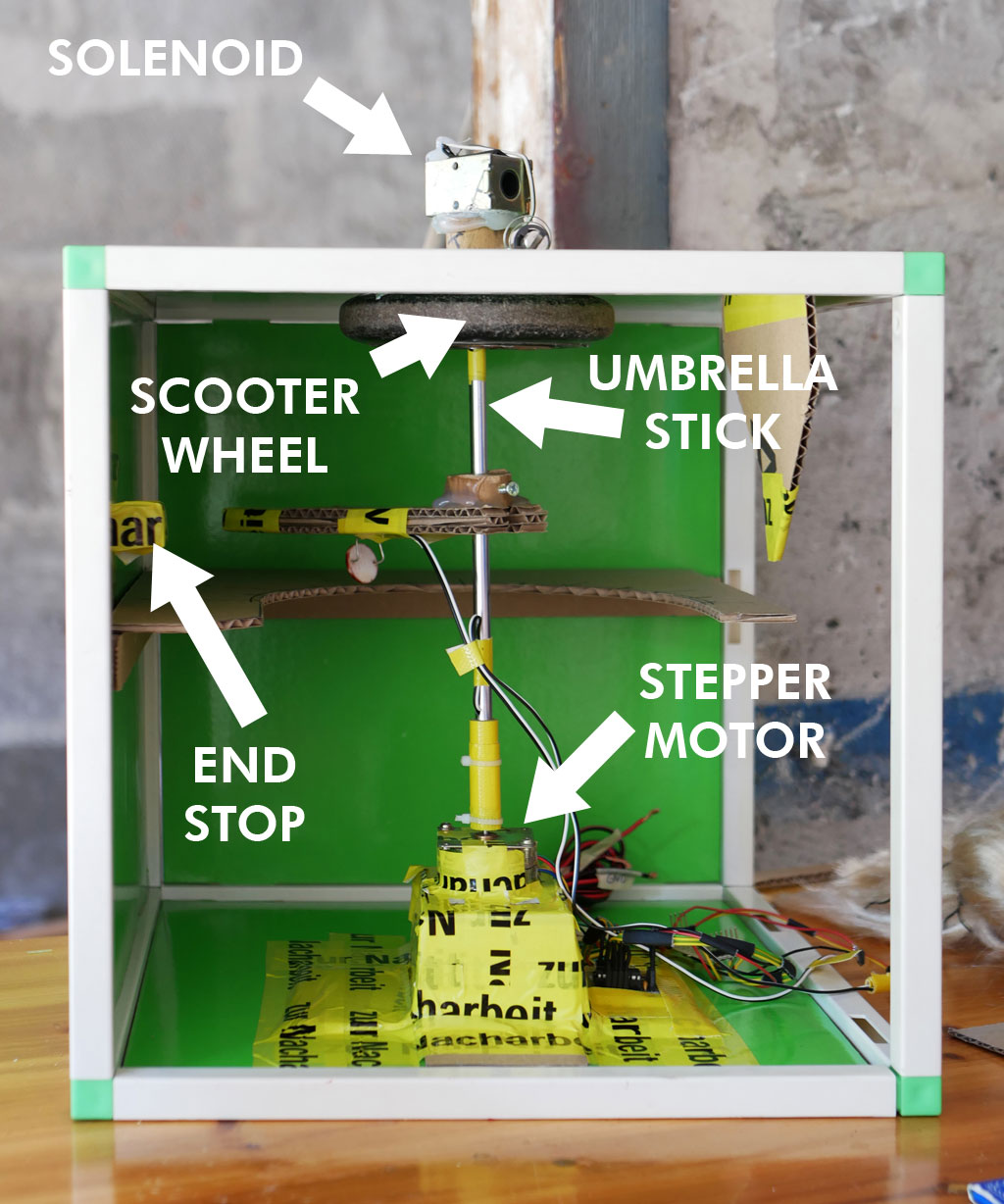
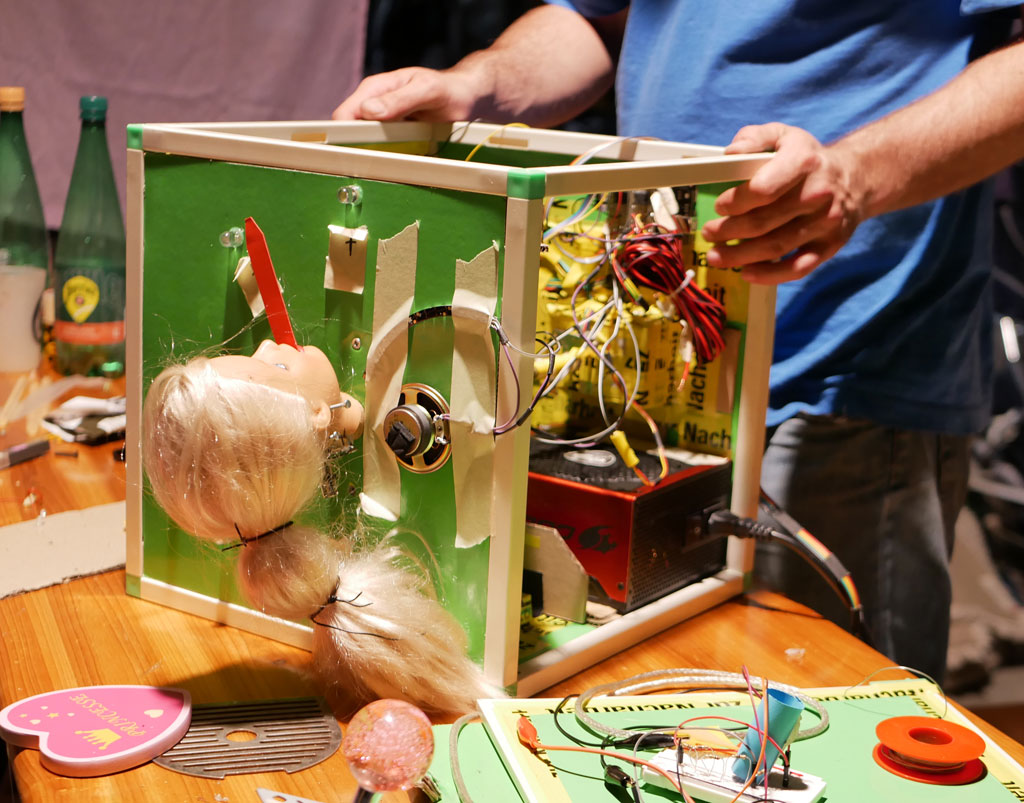
The basic electronics to move Barbie consisted of a solenoid to move her tongue and a salvaged stepper motor to turn her head. Everything was controlled by an Arduino UNO. We mounted all parts inside a beautiful green cardboard container, which we also found in the thrift store. A hollow rod from an umbrella served as an axle and an old scooter wheel was used as bearing. Because we expected that the motor might lose some steps when rapidly changing the direction of the relatively heavy head, we decided not to count steps at all in the microcontroller, but to work around this flaw. We constructed physical end stops out of cardboard, which limited the head's rotation to 180°. The idea was that those end stops would prevent the wires inside the box from twisting around the axle.
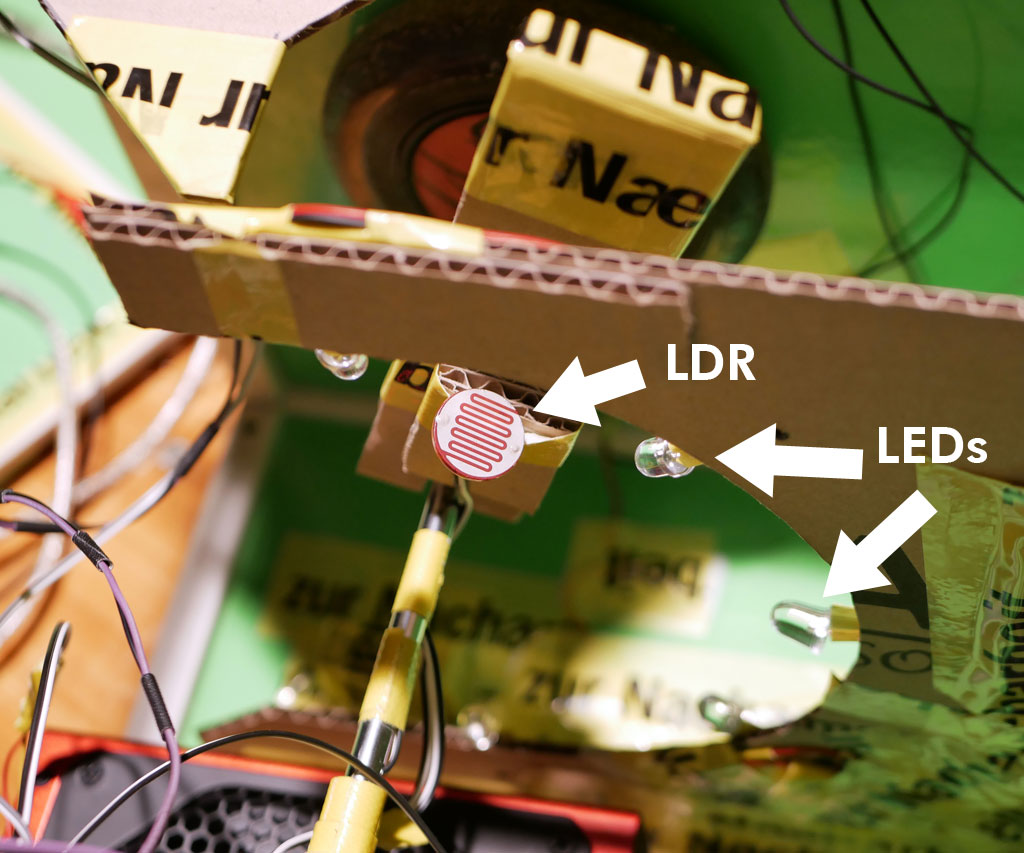
Since the controller did not keep track of the head's position by counting steps, there had to be another way to figure out if the player was aiming Barbie's tongue at the correct, lit up sushi, or somewhere else. We did this by adding another set of LEDs below the surface and inside the box, arranged around the axle moving the head. Each of those LED's hidden from the player was connected in series to one of the LEDs on the playfield which indicated which sushi Barbie has to eat. An LDR was attached to the spinning axle. If that LDR would pick up the light from an LED below the surface, the controller would know that the tongue is aiming at the right sushi position.
Finally, we also added a hugely oversized PC power supply, a speaker for sound output and a strip of neopixels, which would indicate Barbie's hunger level as some sort of score.


Unexpected problems
On the morning of the opening day, the game was finished and we tried it out for the first time. Unfortunately, we discovered that the motor was too weak to turn Barbie's head reliably. Thankfully, we found a replacement motor, a stepper with a reduction gearbox, which was strong enough to power the construction. We built it in and everything seemed to work nicely.
But the replacement came at a price: After letting the game run for one and a half days, the gears were grinded down as a result of the constant bumps into the end stops. It was not a super big issue for the show, as we had a couple similar motors, so we could quickly replace them once they were broken. But the next version of this game will certainly have a strong enough motor plus the Arduino will keep track of the steps, so that this problem won't happen again.

Special thanks
Big thanks to Eniarof-founder Antonin Fourneau, Charlotte Boutier from Décalab and Gwendoline Courboin from La Ressourcerie for inviting us and taking such good care of us. Warm thank you also to our great hosts Catherine and Philippe.
Additional resources
- Kati's documentation of the project
- Diary photos [all CC licensed for reuse]
- Arduino source code [published under Sushi-Ware license]
- Video on Vimeo
- Video on Archive.org